Data-Driven Scene Understanding from 3D Models

|
|
|
|
|
|

|
|
|
|
People
Jason Lin
Martial Hebert
Overview
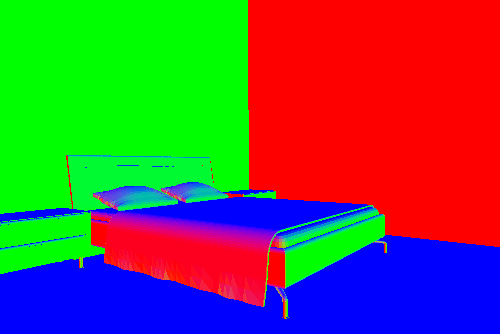
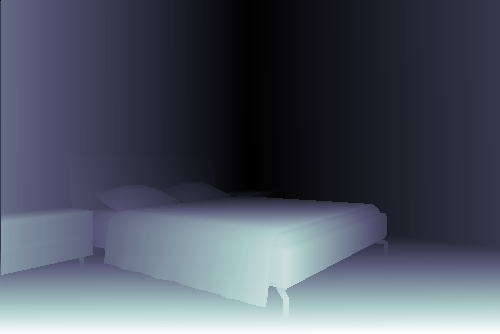
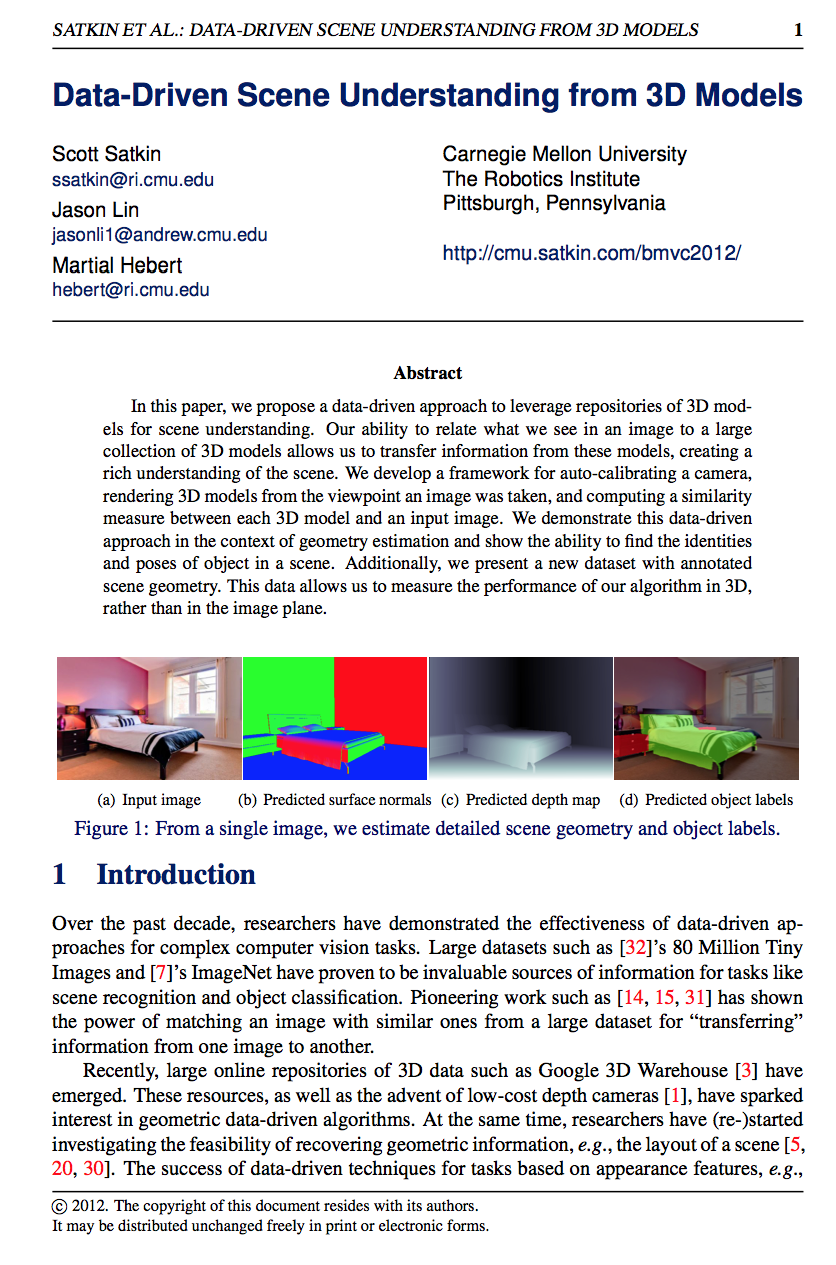
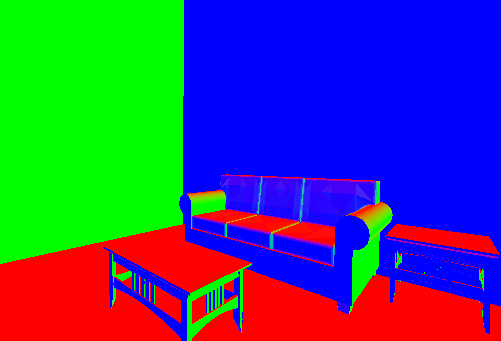
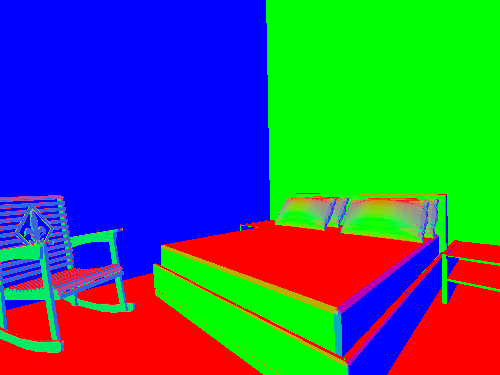
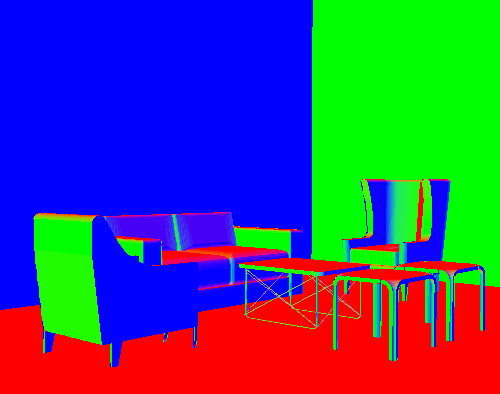
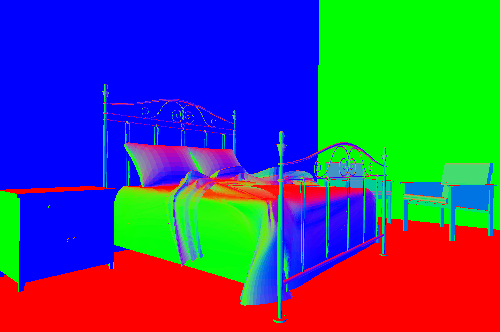
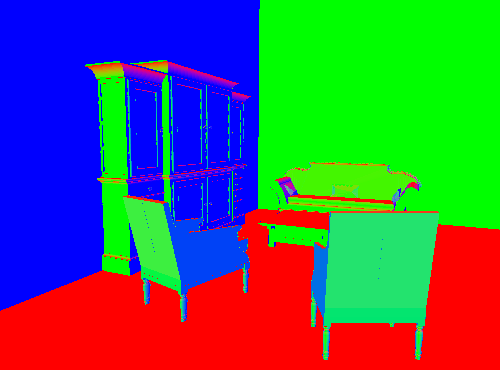
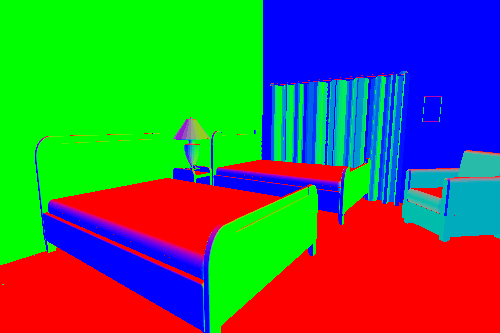
In this paper, we propose a data-driven approach to leverage repositories of 3D models for scene understanding. Our ability to relate what we see in an image to a large collection of 3D models allows us to transfer information from these models, creating a rich understanding of the scene. We develop a framework for auto-calibrating a camera, rendering 3D models from the viewpoint an image was taken, and computing a similarity measure between each 3D model and an input image. We demonstrate this data-driven approach in the context of geometry estimation and show the ability to find the identities and poses of object in a scene. Additionally, we present a new dataset with annotated scene geometry. This data allows us to measure the performance of our algorithm in 3D, rather than in the image plane.
Paper
|
Data-Driven Scene Understanding from 3D Models,
S. Satkin, J. Lin and M. Hebert, Proceedings of the 23rd British Machine Vision Conference (BMVC), September 2012. |
Presentation

|
Videolectures.net Scott Satkin, September 2012. |
CMU 3D-Annotated Scene Database







| This work is licensed under a Creative Commons Attribution-NonCommercial-ShareAlike 3.0 Unported License. |
ASCII files - txt.tar.gz (158MB)
Raw SketchUp files - skp.tar.gz (580MB)
Surface normal & object label renderings - renderings.tar.gz (125MB)
Dataset description- README.txt
Please contact the authors with any additional requests for data.
Funding
This material is based upon work partially supported by the Office of Naval Research under MURI Grant N000141010934.